
Qu’est ce que la coupe de France de robotique e=M6 ?
La Coupe de France de Robotique, la Coupe d'Europe de Robotique et les Trophées e=m6 sont des compétitions organisées par la société de production télévisuelle VM Productions (émission e=m6), l'Association Nationale Sciences Techniques Jeunesse (ANSTJ) et la Ville de la Ferté-Bernard.
La Coupe de France de Robotique est un défi
ludique, scientifique et technique proposé à de jeunes
étudiants des universités et des écoles d'ingénieurs, réunis
en clubs ou dans le cadre de projets d'études, ainsi qu'à des
clubs indépendants.
Les participants doivent concevoir puis réaliser un robot
conforme au règlement et à l'esprit de cette rencontre, apte à
participer aux épreuves.
Notre équipe
Cette année, le thème était la fête foraine.le but étant, placés sur une même aire de jeu, deux robots autonomes doivent percer les ballons de l’adversaire.
Pour cela, nous étions une équipe de 10 personnes (6 venant de troisième année, et 4 de quatrième année).

Nous étions trois pour s’occuper de cette partie : Gaël BERON, Joël GOUIN et moi-même.
Explication du système utilisé
Le système utilisé est basé sur la " technique " de l’IR. Etant donné qu’on avait le droit d’installer des balises (mouchards) sur les ballons mobiles. Nous avons donc eu l’idée d’utiliser des balises émettrices IR.
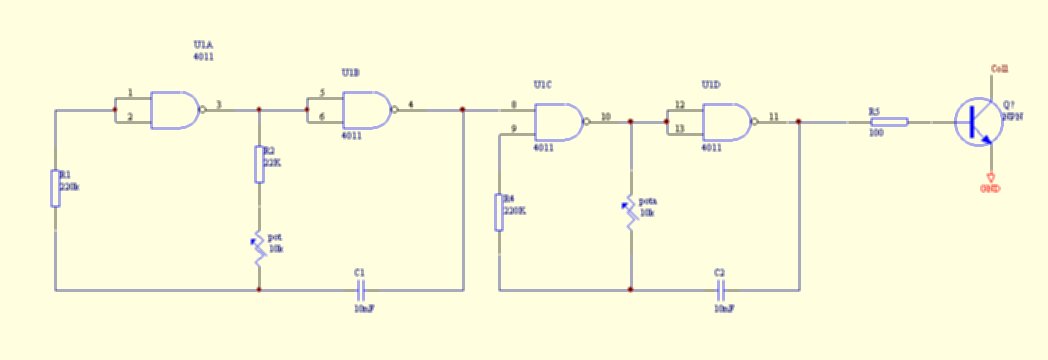
Ces balises ont été conçues pour émettre à une fréquence codée, d’une très grande précision et d’une longueur d’émission suffisante pour que la PMI puisse la détecter. Chaque balise avait une fréquence donnée (balise1 :1600Hz, balise2 :3700Hz), cela nous permettait de différencier les deux ballons.
Pour coder le signal, nous avons fait appel à nos connaissances sur la modulation de fréquence. Par conséquent , nous avons utilisé deux fréquences, l’une pour porter l’information d’où le nom de porteuse et l’autre appelée information qui était la fréquence de la balise choisie par ex :1600Hz). La porteuse avait pour fréquence 37.9Khz car le récepteur KODENSHI recevait que cette fréquence. Sa particularité était de faire le traitement de la réception du signal IR et de nous donner sur la patte de sortie, le signal sans la porteuse, et donc par la même occasion, d’avoir l’information voulue.
Remarque : Ce système est souvent utilisé pour les télécommandes IR sur les téléviseurs.
Sur la PMI, nous l’avons équipé d’un moteur PAP pilotant un socle de forme ronde où était positionné le récepteur infrarouge KODENSHI. Ce moteur PAP était piloté par un contrôleur de moteur PAP (MC3479). Celui-ci avait pour fonction de traiter les informations (CLK : pour régler la vitesse du moteur, OIC : pour diminuer l’intensité du courant, F/H : pour choisir le mode demi-pas ou pas entier, CW : pour choisir le sens de rotation du moteur, tous ces signaux venant d’un des ports du microcontrôleur (AT89C52)) et de les transmettre sous une forme appropriée au moteur. D’autres part, le signal venant du récepteur KODENSHI, entrait directement dans un comparateur de fréquence (NE567) permettant de comparer le signal à une fréquence fixée donné par un simple circuit RC, si les deux fréquences étaient égales alors le NE567 donnait sur sa patte de sortie un 0 sinon un 1. Cette sortie était directement reliée à une interruption (par exemple :INT0) du microcontrôleur, ceux-ci permettant d’arrêter le moteur quand il détectait une balise. Bien sûr, entre deux, il y avait un multiplexeur pour choisir l’une des deux balises.
Remarque : La carte repérage, et les autres cartes électroniques de la PMI étaient isolées au niveau des masses afin d’éviter les parasites. L’alimentation du moteur PAP et l'alimentation des autres composants de la carte étaient eux aussi isolées. Pour cela, nous avons utilisé des otptocoupleurs. Ceux-ci est très important car sinon le système aurait pu être défectueux. D'autres part, vous devait par le biais de transistor, amplifier le courant au nivau des signaux venant du microcontrôleur allant vers le contrôleur du moteur PAP.
Vous trouverez ci-dessous différents schémas qui composent notre PMI repérage et bien sur la photo de nos trois robots qui étaient à cette époque en phase de construction.
Emission: Schéma de la carte émission
Reception: Schéma de la carte réception
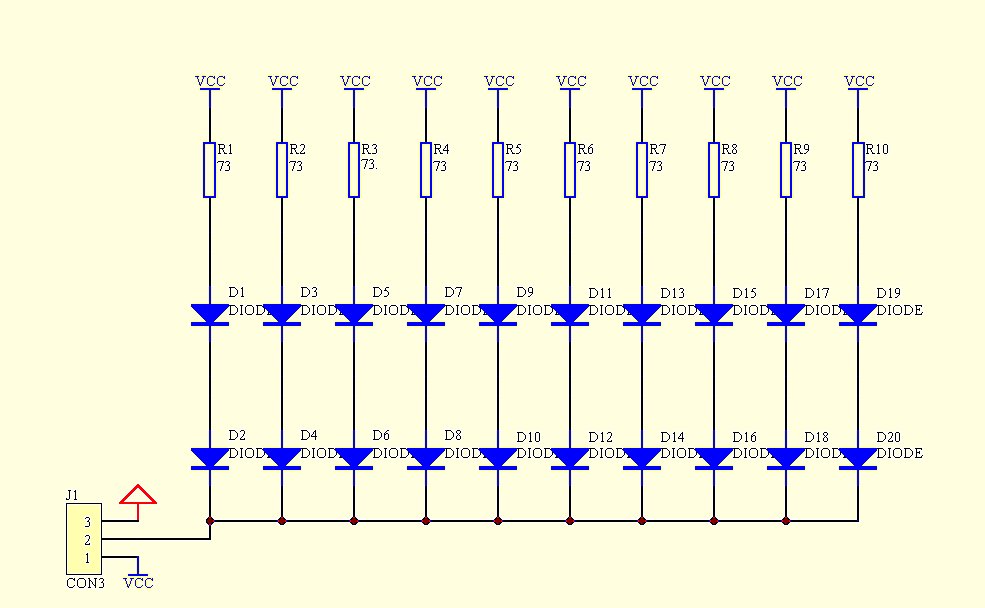
Leds: Schéma électrique de la carte leds
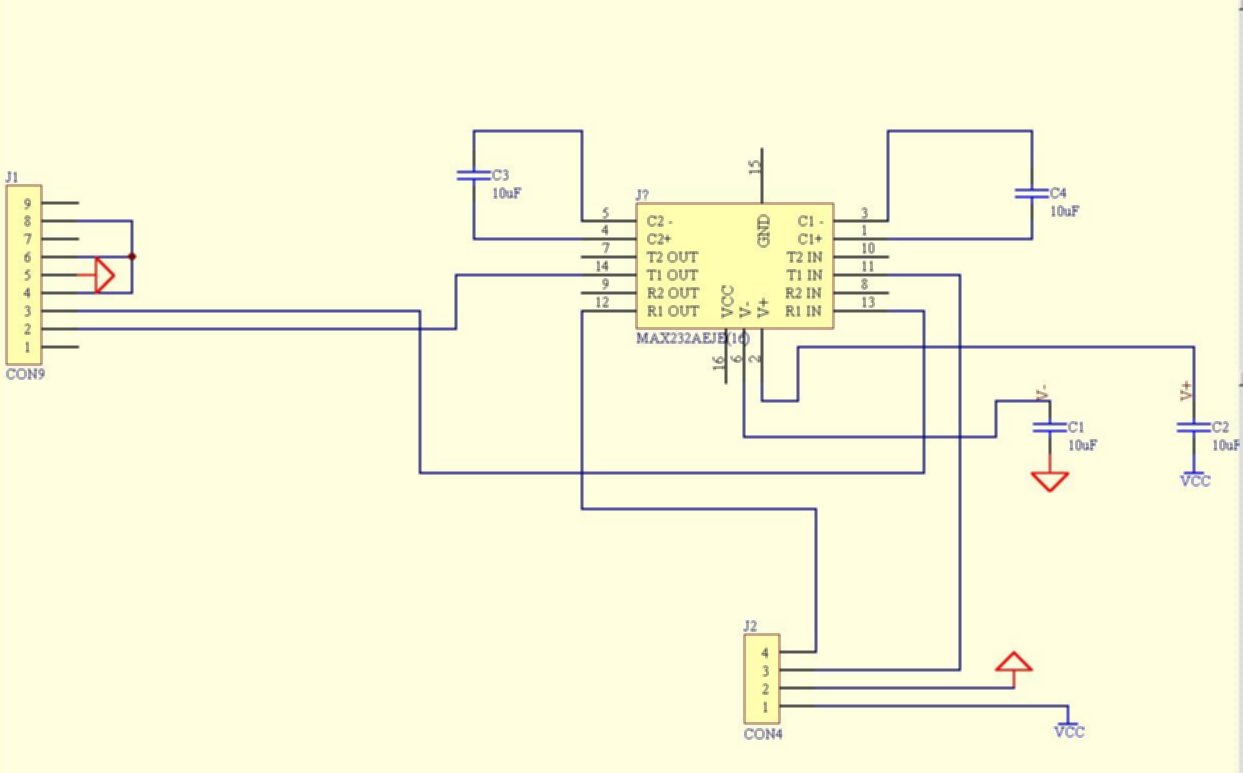
Max232: Schéma électrique de la carte de communication entre la carte réception et le PC
{kind=link}
{kind=link}
{kind=link}
{kind=link}